#include <AngleSymbols.h>
Inheritance diagram for AngleSymbols:
Definition at line 22 of file AngleSymbols.h.
|
|
The angle that is shown by the top white LEDs.
Definition at line 55 of file AngleSymbols.h. Referenced by registerSymbols(). |
|
|
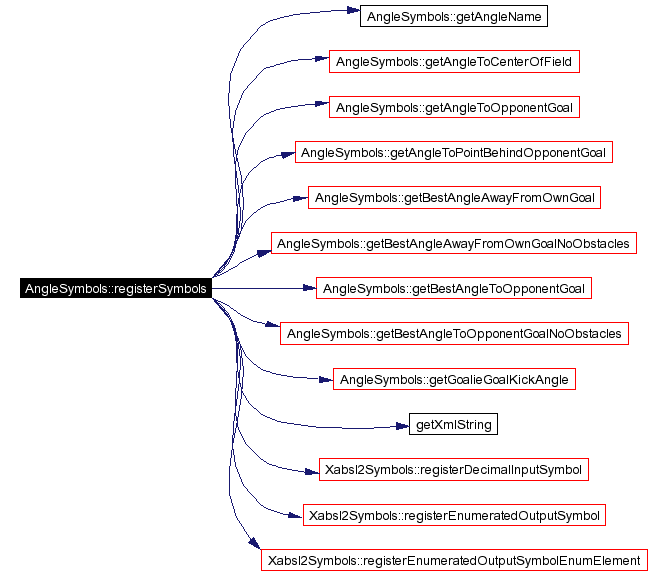
Definition at line 16 of file AngleSymbols.cpp. References angleShownByLEDs. |
|
Here is the call graph for this function:
|
|
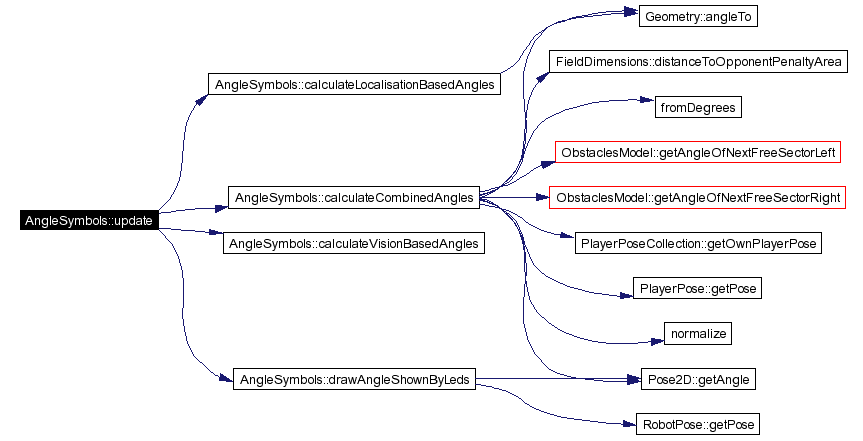
updates the symbols
Definition at line 70 of file AngleSymbols.cpp. References calculateCombinedAngles(), calculateLocalisationBasedAngles(), calculateVisionBasedAngles(), and drawAngleShownByLeds(). Referenced by GT2004BehaviorControl::execute(). |
Here is the call graph for this function:
|
|
calculates the value for the symbol "robot-pose.best-angle-away-from-own-goal" Definition at line 79 of file AngleSymbols.cpp. References angleToCenterOfField, normalize(), and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "robot-pose.angle-to-opponent-goal" Definition at line 80 of file AngleSymbols.cpp. References angleToOpponentGoal, normalize(), and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
calculates the value for the symbol "robot-pose.angle-to-point-behind-opponent-goal" Definition at line 81 of file AngleSymbols.cpp. References angleToPointBehindOpponentGoal, normalize(), and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
calculates the value for the symbol "robot-pose.best-angle-to-opponent-goal" Definition at line 84 of file AngleSymbols.cpp. References bestAngleToOpponentGoal, normalize(), and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
calculates the value for the symbol "robot-pose.best-angle-to-opponent-goal-no-obstacles" Definition at line 85 of file AngleSymbols.cpp. References bestAngleToOpponentGoalNoObstacles, normalize(), and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
calculates the value for the symbol "robot-pose.best-angle-away-from-own-goal" Definition at line 86 of file AngleSymbols.cpp. References bestAngleAwayFromOwnGoal, normalize(), and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
calculates the value for the symbol "robot-pose.best-angle-away-from-own-goal-no-obstacles" Definition at line 87 of file AngleSymbols.cpp. References bestAngleAwayFromOwnGoalNoObstacles, normalize(), and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
calculates the value for the symbol "goalie.goal-kick-angle" Definition at line 88 of file AngleSymbols.cpp. References goalieGoalKickAngle, normalize(), and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
Definition at line 337 of file AngleSymbols.cpp. Referenced by GT2004BehaviorControl::postExecute(). |
|
|
|
Definition at line 342 of file AngleSymbols.cpp. References angleShownByLEDs, DEBUG_DRAWING_FINISHED, Pose2D::getAngle(), RobotPose::getPose(), LINE, Pose2D::translation, Vector2< double >::x, and Vector2< double >::y. Referenced by update(). |
Here is the call graph for this function:

|
|
Definition at line 111 of file AngleSymbols.cpp. References ObstaclesModel::angleToFreePartOfGoal, and angleToFreePartOfOpponentGoal. Referenced by update(). |
|
|
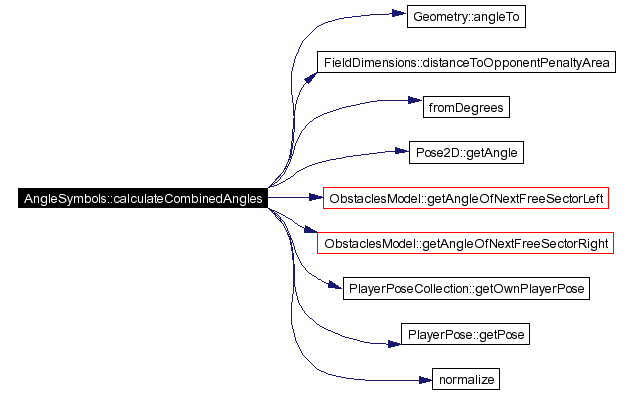
Definition at line 90 of file AngleSymbols.cpp. References Geometry::angleTo(), angleToCenterOfField, angleToLeftOpponentGoalCorner, angleToLeftOpponentGoalPost, angleToOpponentGoal, angleToPointBehindOpponentGoal, angleToRightOpponentGoalCorner, angleToRightOpponentGoalPost, and pi2. Referenced by update(). |
Here is the call graph for this function:

|
Here is the call graph for this function:
|
|
Definition at line 108 of file AngleSymbols.h. Referenced by AngleSymbols(), drawAngleShownByLeds(), GT2004BehaviorControl::postExecute(), GT2004BehaviorControl::preExecute(), and registerSymbols(). |
|
|
Definition at line 115 of file AngleSymbols.h. |
 1.3.6
1.3.6