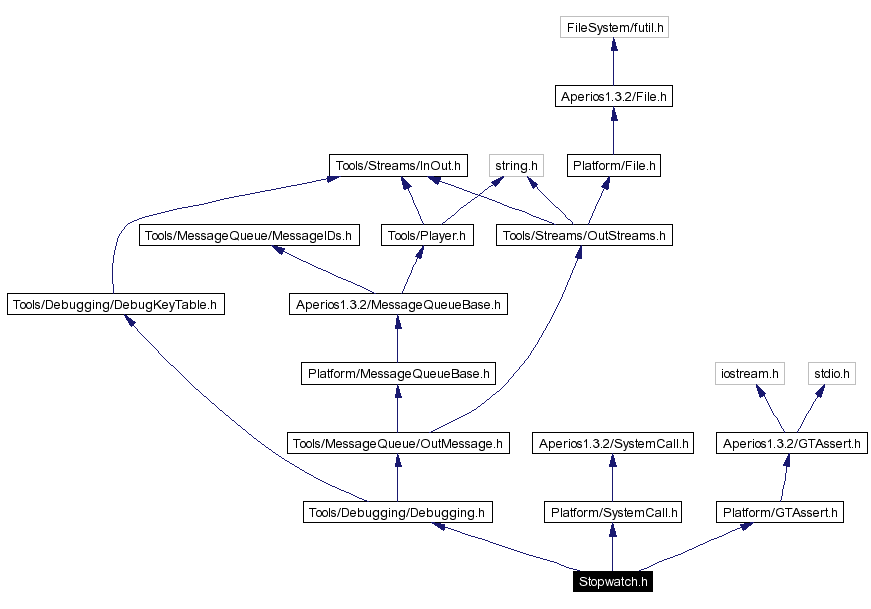
#include "Tools/Debugging/Debugging.h"
#include "Platform/SystemCall.h"
#include "Platform/GTAssert.h"
Include dependency graph for Stopwatch.h:
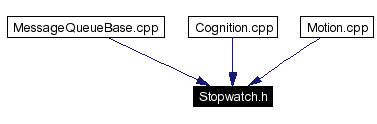
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Stopwatch |
| Provides IDs and names for different stopwatch tasks; makros are used to provide real stopwatch functionality with that. More... | |
Defines | |
| #define | STOP_TIME_ON_REQUEST(eventID, expression) |
| Stops the execution time of "expression" if a DebugKey is set for the eventID. | |
| #define | STOP_TIME(expression) |
| Starts a StopWatch without an id. | |
Definition in file Stopwatch.h.
|
|
Value: if (getDebugKeyTable().isActive(Stopwatch::getDebugKeyID(Stopwatch::eventID))) \ {\ unsigned long eventID##StartTime; \ static unsigned long evendID##Counter = 0; \ eventID##StartTime = SystemCall::getCurrentSystemTime();\ expression \ OUTPUT(idStopwatch, bin, (char) Stopwatch::eventID << eventID##StartTime << SystemCall::getCurrentSystemTime() << evendID##Counter++)\ }\ else {expression}\ The start and stop times are sent as a idStopwatch message to RobotControl Definition at line 110 of file Stopwatch.h. Referenced by Motion::main(), and Cognition::main(). |
|
|
Value: {\
unsigned long stopwatchStartTime = SystemCall::getCurrentSystemTime();\
expression\
OUTPUT(idText, text, "Stopwatch: " << SystemCall::getTimeSince(stopwatchStartTime) << "ms")\
}\
Definition at line 125 of file Stopwatch.h. |
 1.3.6
1.3.6