#include <FormationObject.h>
Inheritance diagram for SingleFormation:
Public Member Functions | |
| SingleFormation () | |
| Constructor. | |
| virtual | ~SingleFormation () |
| Destructor. | |
| virtual bool | isActive () const |
| Checks if the formation is active. | |
| virtual bool | isStatic () const |
| Checks if the formation has a static position. | |
| virtual PfVec | getPosition (const PfPose &robotPose) |
| Returns the position of the formation in reference to the robot pose (used for A*-search to a formation). | |
| virtual PfVec | getVec (const PfPose &otherPose) |
| Returns the field vector to/from a formation to/from a given pose. | |
| virtual double | getCharge (const PfPose &otherPose) |
| Returns the field charge of the formation at a given pose. | |
| double | getDistanceToFormation (const PfPose &otherPose) const |
| Returns the distance between a pose and the formation area. | |
| void | addObject (Object *object) |
| Adds an object to the formation. | |
| void | setFunction (PotentialfieldFunction *function) |
| Sets the function of the field of the formation. | |
| void | setPriority (double priority) |
| Sets the priority of the formation. | |
| double | getPriority () const |
| Returns the priority of the formation. | |
| void | init () |
| Initializes the formation. | |
| virtual bool | positionInsideFormation (const PfVec &p) const |
| Checks if a position is inside the formation area. | |
| virtual SingleFormation * | copy () const |
| Creates a copy of the formation object. | |
Protected Member Functions | |
| virtual void | updateGeometry () |
| Updates the positions of the formation. | |
Protected Attributes | |
| std::vector< Object * > | objects |
| The objects the formation is spanning. | |
| Object | geometricFormationObject |
| An object representing the shape of the formation. | |
| PfVec | robotPosition |
| The position of the robot (kept for internal purposes). | |
| double | priority |
| The priority of the formation (may be used for selection). | |
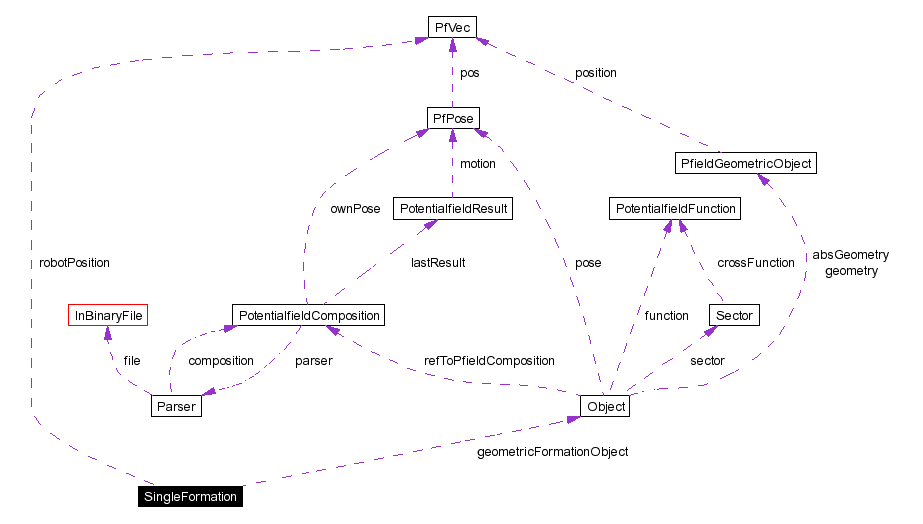
Definition at line 35 of file FormationObject.h.
|
|
Constructor.
Definition at line 17 of file FormationObject.cpp. References geometricFormationObject, Object::setField(), and SHAPE_FIELD. Referenced by copy(). |
Here is the call graph for this function:

|
|
Destructor.
Definition at line 42 of file FormationObject.h. |
|
|
Checks if the formation is active.
Reimplemented in BetweenFormation, AmongFormation, RelativeFormation, and BestFitFormation. Definition at line 47 of file FormationObject.h. |
|
|
Checks if the formation has a static position.
Reimplemented in BestFitFormation. Definition at line 23 of file FormationObject.cpp. References objects. |
|
|
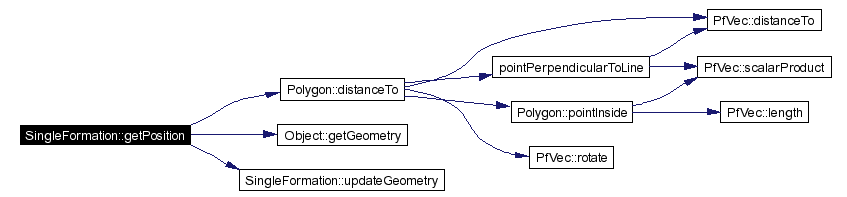
Returns the position of the formation in reference to the robot pose (used for A*-search to a formation).
Reimplemented in BestFitFormation. Definition at line 37 of file FormationObject.cpp. References Polygon::distanceTo(), geometricFormationObject, Object::getGeometry(), PfPose::pos, robotPosition, and updateGeometry(). |
Here is the call graph for this function:
|
|
Returns the field vector to/from a formation to/from a given pose.
Reimplemented in BestFitFormation. Definition at line 55 of file FormationObject.cpp. References Object::computeAbsFieldVecAt(), geometricFormationObject, PfPose::pos, positionInsideFormation(), robotPosition, and updateGeometry(). |
Here is the call graph for this function:

|
|
Returns the field charge of the formation at a given pose.
Reimplemented in BestFitFormation. Definition at line 70 of file FormationObject.cpp. References Object::computeChargeAt(), geometricFormationObject, PfPose::pos, robotPosition, and updateGeometry(). |
Here is the call graph for this function:

|
|
Returns the distance between a pose and the formation area.
Definition at line 84 of file FormationObject.cpp. References PfieldGeometricObject::distanceTo(), geometricFormationObject, Object::getGeometry(), and PfPose::pos. |
Here is the call graph for this function:

|
|
Adds an object to the formation.
Definition at line 78 of file FormationObject.cpp. References objects. Referenced by Parser::parseSingleFormation(). |
|
|
Sets the function of the field of the formation.
Definition at line 88 of file FormationObject.h. References geometricFormationObject, and Object::setFunction(). Referenced by Parser::parseSingleFormation(). |
Here is the call graph for this function:

|
|
Sets the priority of the formation.
Definition at line 94 of file FormationObject.h. Referenced by Parser::parseSingleFormation(). |
|
|
Returns the priority of the formation.
Definition at line 100 of file FormationObject.h. References priority. |
|
|
Initializes the formation.
Definition at line 104 of file FormationObject.h. References updateGeometry(). Referenced by Parser::parseSingleFormation(). |
Here is the call graph for this function:

|
|
Checks if a position is inside the formation area.
Reimplemented in BetweenFormation, and AmongFormation. Definition at line 111 of file FormationObject.h. Referenced by getVec(). |
|
|
Creates a copy of the formation object.
Reimplemented in RelativeFormation, and BestFitFormation. Definition at line 92 of file FormationObject.cpp. References geometricFormationObject, objects, priority, robotPosition, and SingleFormation(). |
Here is the call graph for this function:

|
|
Updates the positions of the formation.
Reimplemented in BetweenFormation, AmongFormation, RelativeFormation, and BestFitFormation. Definition at line 129 of file FormationObject.h. Referenced by getCharge(), getPosition(), getVec(), and init(). |
|
|
The objects the formation is spanning.
Definition at line 121 of file FormationObject.h. Referenced by addObject(), RelativeFormation::copy(), copy(), and isStatic(). |
|
|
An object representing the shape of the formation.
Definition at line 123 of file FormationObject.h. Referenced by RelativeFormation::copy(), copy(), getCharge(), getDistanceToFormation(), getPosition(), getVec(), setFunction(), and SingleFormation(). |
|
|
The position of the robot (kept for internal purposes).
Definition at line 125 of file FormationObject.h. Referenced by RelativeFormation::copy(), copy(), getCharge(), getPosition(), and getVec(). |
|
|
The priority of the formation (may be used for selection).
Definition at line 127 of file FormationObject.h. Referenced by copy(), and getPriority(). |
 1.3.6
1.3.6