#include <MotorCommandsSender.h>
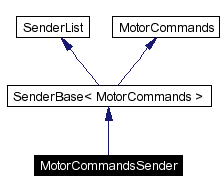
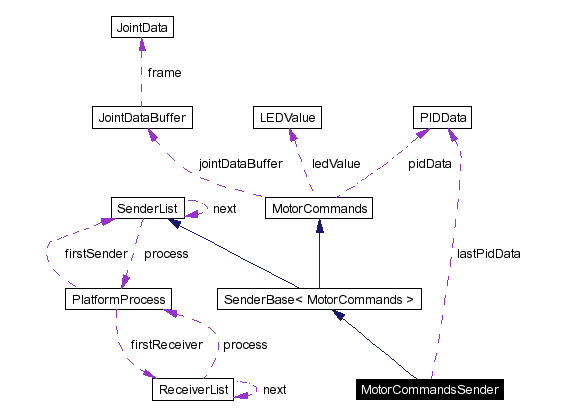
Inheritance diagram for MotorCommandsSender:
Public Member Functions | |
| MotorCommandsSender (PlatformProcess *process, bool blocking) | |
| The constructor. | |
| ~MotorCommandsSender () | |
| Destructor. | |
Protected Member Functions | |
| virtual void | preparePackage () |
| The function prepares a package. | |
| virtual void | setPackage (const ObserverID &receiver) |
| The functions sets a package for a receiver. | |
| virtual void | freePackage () |
| The function frees the package. | |
Static Private Member Functions | |
| const char * | getPrimitiveJointName (int i) |
| Returns OPENR Primitive Joint Name. | |
| const char * | getPrimitiveLEDName (int i) |
| Return OPENR Primitive LED Name. | |
Private Attributes | |
| OPrimitiveID | jointId [JointData::numOfJoint] |
| The Open-R IDs of all joints. | |
| bool | jointGainsSet |
| A flag that states whether the joint gains were initialized. | |
| MemoryRegionID | memID |
| The memory region of the only package instance. | |
| OCommandVectorData * | cmdVec |
| A pointer to the data in the package. | |
| RCRegion * | package |
| The only instance of a package. | |
| PIDData | lastPidData |
| The last joint gains sent. | |
| int | numOfLED |
| The number of LEDs of the robot. | |
Definition at line 19 of file MotorCommandsSender.h.
|
||||||||||||
|
The constructor.
Definition at line 9 of file MotorCommandsSender.cpp. References cmdVec, getPrimitiveJointName(), getPrimitiveLEDName(), SystemCall::getRobotDesign(), jointId, memID, numOfLED, and VERIFY. |
Here is the call graph for this function:

|
|
Destructor.
Definition at line 57 of file MotorCommandsSender.cpp. |
|
|
Returns OPENR Primitive Joint Name.
Definition at line 33 of file MotorCommandsSender.h. References SystemCall::getRobotDesign(). Referenced by MotorCommandsSender(). |
Here is the call graph for this function:

|
|
Return OPENR Primitive LED Name.
Definition at line 91 of file MotorCommandsSender.h. References SystemCall::getRobotDesign(). Referenced by MotorCommandsSender(). |
Here is the call graph for this function:

|
|
The function prepares a package.
Reimplemented from SenderBase< MotorCommands >. Definition at line 62 of file MotorCommandsSender.cpp. References SystemCall::getRobotDesign(), and package. |
Here is the call graph for this function:

|
|
The functions sets a package for a receiver.
Reimplemented from SenderBase< MotorCommands >. Definition at line 152 of file MotorCommandsSender.cpp. |
|
|
The function frees the package.
Reimplemented from SenderBase< MotorCommands >. Definition at line 157 of file MotorCommandsSender.cpp. |
|
|
The Open-R IDs of all joints.
Definition at line 22 of file MotorCommandsSender.h. Referenced by MotorCommandsSender(). |
|
|
A flag that states whether the joint gains were initialized.
Definition at line 23 of file MotorCommandsSender.h. |
|
|
The memory region of the only package instance.
Definition at line 24 of file MotorCommandsSender.h. Referenced by MotorCommandsSender(), and ~MotorCommandsSender(). |
|
|
A pointer to the data in the package.
Definition at line 25 of file MotorCommandsSender.h. Referenced by MotorCommandsSender(). |
|
|
The only instance of a package.
Definition at line 26 of file MotorCommandsSender.h. Referenced by preparePackage(), and setPackage(). |
|
|
The last joint gains sent.
Definition at line 27 of file MotorCommandsSender.h. |
|
|
The number of LEDs of the robot.
Definition at line 28 of file MotorCommandsSender.h. Referenced by MotorCommandsSender(). |
 1.3.6
1.3.6