#include <GT2004SimpleBasicBehaviors.h>
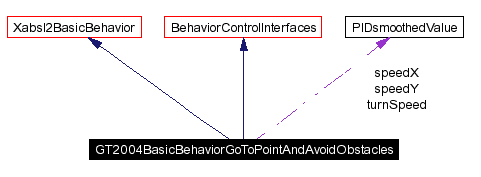
Inheritance diagram for GT2004BasicBehaviorGoToPointAndAvoidObstacles:
Public Member Functions | |
| GT2004BasicBehaviorGoToPointAndAvoidObstacles (BehaviorControlInterfaces &interfaces, Xabsl2ErrorHandler &errorHandler) | |
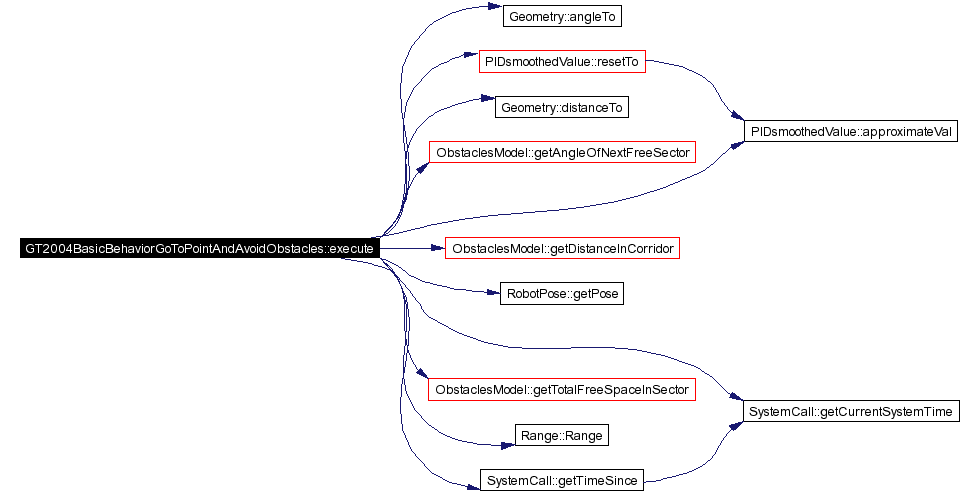
| virtual void | execute () |
| Executes the basic behavior. | |
Private Attributes | |
| double | x |
| parameter "go-to-point-and-avoid-obstacles.x" | |
| double | y |
| parameter "go-to-point-and-avoid-obstacles.y" | |
| double | maxSpeed |
| parameter "go-to-point-and-avoid-obstacles.max-speed" | |
| double | avoidanceLevel |
| parameter "go-to-point-and-avoid-obstacles.avoid-penalty-areas" | |
| PIDsmoothedValue | turnSpeed |
| smoothes the rotation | |
| PIDsmoothedValue | speedX |
| smoothes the speed in forward direction | |
| PIDsmoothedValue | speedY |
| smoothes the speed in sideways direction | |
| long | lastTimeExecuted |
| last time behavior was executed | |
Definition at line 378 of file GT2004SimpleBasicBehaviors.h.
|
||||||||||||
|
Definition at line 386 of file GT2004SimpleBasicBehaviors.h. References avoidanceLevel, pi, point, Xabsl2BasicBehavior::registerParameter(), and turnSpeed. |
Here is the call graph for this function:

|
Here is the call graph for this function:
|
|
parameter "go-to-point-and-avoid-obstacles.x"
Definition at line 405 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "go-to-point-and-avoid-obstacles.y"
Definition at line 408 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "go-to-point-and-avoid-obstacles.max-speed"
Definition at line 411 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "go-to-point-and-avoid-obstacles.avoid-penalty-areas"
Definition at line 414 of file GT2004SimpleBasicBehaviors.h. Referenced by GT2004BasicBehaviorGoToPointAndAvoidObstacles(). |
|
|
smoothes the rotation
Definition at line 417 of file GT2004SimpleBasicBehaviors.h. Referenced by execute(), and GT2004BasicBehaviorGoToPointAndAvoidObstacles(). |
|
|
smoothes the speed in forward direction
Definition at line 420 of file GT2004SimpleBasicBehaviors.h. |
|
|
smoothes the speed in sideways direction
Definition at line 423 of file GT2004SimpleBasicBehaviors.h. |
|
|
last time behavior was executed
Definition at line 426 of file GT2004SimpleBasicBehaviors.h. Referenced by execute(). |
 1.3.6
1.3.6