#include <GT2004SimpleBasicBehaviors.h>
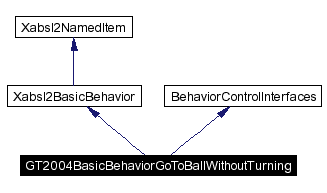
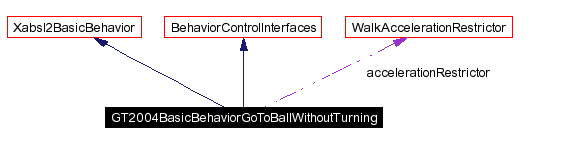
Inheritance diagram for GT2004BasicBehaviorGoToBallWithoutTurning:
Public Member Functions | |
| GT2004BasicBehaviorGoToBallWithoutTurning (BehaviorControlInterfaces &interfaces, Xabsl2ErrorHandler &errorHandler) | |
| virtual void | execute () |
| Executes the basic behavior. | |
Private Attributes | |
| double | distanceAtEnd |
| parameter "go-to-ball.distance" | |
| double | maxSpeed |
| parameter "go-to-ball.max-speed" | |
| double | maxSpeedY |
| parameter "go-to-ball.max-speed.y" | |
| WalkAccelerationRestrictor | accelerationRestrictor |
| Restricts the walk acceleration to maximum values. | |
| double | targetAngleToBall |
| parameter "go-to-ball.target-angle-to-ball" | |
| double | yOffset |
| parameter "go-to-ball.y-offset" | |
| double | walkType |
| parameter "walk-type" | |
| double | maxTurnSpeed |
| parameter "max-turn-speed" | |
Matthias Jüngel
Definition at line 86 of file GT2004SimpleBasicBehaviors.h.
|
||||||||||||
|
Definition at line 94 of file GT2004SimpleBasicBehaviors.h. References Xabsl2BasicBehavior::registerParameter(). |
Here is the call graph for this function:

|
|
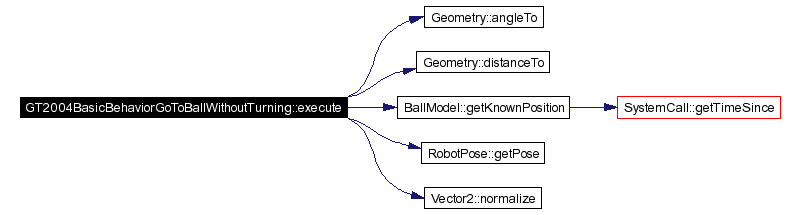
Executes the basic behavior.
Implements Xabsl2BasicBehavior. Definition at line 103 of file GT2004SimpleBasicBehaviors.cpp. References Geometry::angleTo(), Geometry::distanceTo(), BallModel::getKnownPosition(), RobotPose::getPose(), MotionRequest::motionType, Vector2< V >::normalize(), Pose2D::rotation, Pose2D::translation, WalkRequest::walkParams, MotionRequest::walkRequest, WalkRequest::walkType, Vector2< V >::x, Vector2< double >::x, Vector2< V >::y, and Vector2< double >::y. |
Here is the call graph for this function:
|
|
parameter "go-to-ball.distance"
Definition at line 108 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "go-to-ball.max-speed"
Definition at line 111 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "go-to-ball.max-speed.y"
Definition at line 114 of file GT2004SimpleBasicBehaviors.h. |
|
|
Restricts the walk acceleration to maximum values.
Definition at line 117 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "go-to-ball.target-angle-to-ball"
Definition at line 120 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "go-to-ball.y-offset"
Definition at line 123 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "walk-type"
Definition at line 126 of file GT2004SimpleBasicBehaviors.h. |
|
|
parameter "max-turn-speed"
Definition at line 129 of file GT2004SimpleBasicBehaviors.h. |
 1.3.6
1.3.6