#include <GT2004SimpleBasicBehaviors.h>
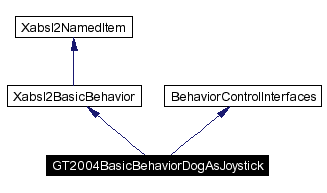
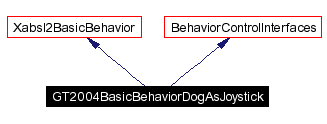
Inheritance diagram for GT2004BasicBehaviorDogAsJoystick:
Public Member Functions | |
| GT2004BasicBehaviorDogAsJoystick (BehaviorControlInterfaces &interfaces, Xabsl2ErrorHandler &errorHandler) | |
| virtual void | execute () |
| Executes the basic behavior. | |
Definition at line 474 of file GT2004SimpleBasicBehaviors.h.
|
||||||||||||
|
Definition at line 482 of file GT2004SimpleBasicBehaviors.h. |
|
|
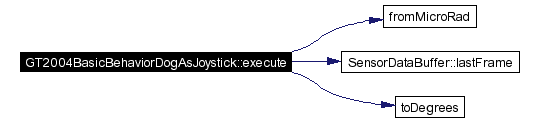
Executes the basic behavior.
Implements Xabsl2BasicBehavior. Definition at line 600 of file GT2004SimpleBasicBehaviors.cpp. References SensorData::data, fromMicroRad(), SensorDataBuffer::lastFrame(), toDegrees(), and BehaviorTeamMessage::walkRequest. |
Here is the call graph for this function:
 1.3.6
1.3.6