
#include <FutureWorldModelGenerator.h>
Public Member Functions | |
| void | transformWorldState (const PfPose &poseNow, PfPose &poseThen, Action &action, Actionfield *callingField, std::vector< Object * > &worldStateNow, std::vector< Object * > &worldStateThen, std::vector< Object * > &worldStateStatic) |
| Transforms the world state by applying an action. | |
Static Public Member Functions | |
| FutureWorldModelGenerator * | getFutureWorldModelGenerator () |
| Returns a pointer to the class (which is a singleton). | |
Private Member Functions | |
| FutureWorldModelGenerator () | |
| Constructor. | |
| void | executeSingleTransformation (PfPose &pose, Action &action, PotentialfieldTransformation *transformation, Actionfield *callingField, std::vector< Object * > &dynamicWorldState, std::vector< Object * > &staticWorldState) |
| Executes a transformation. | |
| double | getMaxTranslationForObject (const PfPose &objectPose, const PfVec &translation, std::vector< Object * > &otherObjects, std::vector< Object * > &otherStaticObjects, int excludedObject=-1) |
| Checks a planned transformation for collisions. | |
| double | getMaxRotationForObject (const PfPose &objectPose, const PfPose &rotationPose, double rotation, std::vector< Object * > &otherObjects, std::vector< Object * > &otherStaticObjects, int excludedObject=-1) |
| Checks a planned rotation for collisions. | |
Definition at line 32 of file FutureWorldModelGenerator.h.
|
|
Constructor.
Definition at line 36 of file FutureWorldModelGenerator.h. |
|
|
Returns a pointer to the class (which is a singleton).
Definition at line 42 of file FutureWorldModelGenerator.h. Referenced by Actionfield::Actionfield(). |
|
||||||||||||||||||||||||||||||||
|
Transforms the world state by applying an action.
Definition at line 19 of file FutureWorldModelGenerator.cpp. References Action::actionType, executeSingleTransformation(), PfPose::hasProbabilityDistribution, Action::joinAction, MEASURE_OBJECT, MEASURE_SELF, MOVE_OBJECT, MOVE_SELF, Action::objectIdx, PfPose::probabilityDistribution, PfPose::setPoseFromSamples(), Action::time, and Action::transformations. Referenced by Actionfield::execute(), and Actionfield::findBestSequence(). |
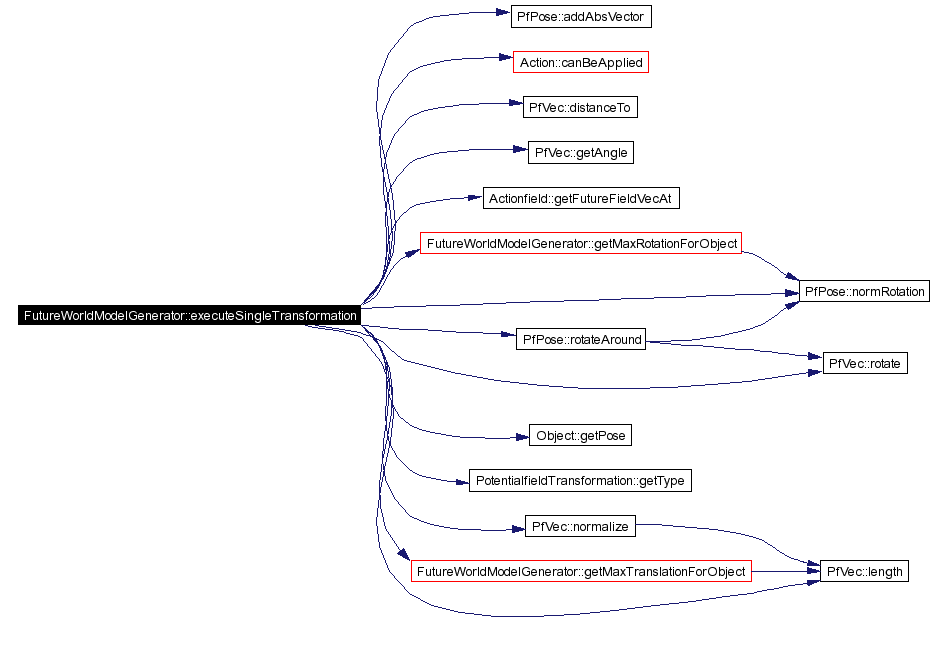
Here is the call graph for this function:
|
||||||||||||||||||||||||||||
Here is the call graph for this function:
|
||||||||||||||||||||||||
|
Checks a planned transformation for collisions.
Definition at line 326 of file FutureWorldModelGenerator.cpp. References intersectGeometricObjects(), PfVec::length(), Line::p1, Line::p2, PfPose::pos, PfieldGeometricObject::position, and PfieldGeometricObject::radiusOfCollisionCircle. Referenced by executeSingleTransformation(). |
Here is the call graph for this function:

|
||||||||||||||||||||||||||||
|
Checks a planned rotation for collisions.
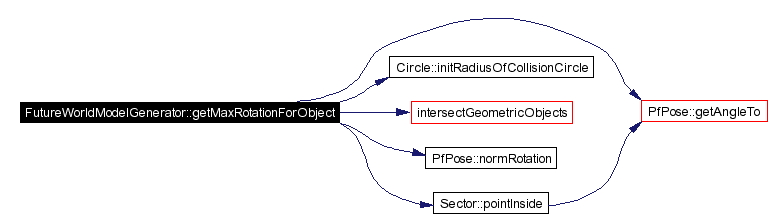
Definition at line 394 of file FutureWorldModelGenerator.cpp. References EPSILON, PfPose::getAngleTo(), Circle::initRadiusOfCollisionCircle(), intersectGeometricObjects(), PfPose::normRotation(), Sector::openingAngle, point, Sector::pointInside(), PfPose::pos, PfieldGeometricObject::position, Circle::radius, and PfPose::rotation. Referenced by executeSingleTransformation(). |
Here is the call graph for this function:
 1.3.6
1.3.6