#include <ChallengeSymbols.h>
Inheritance diagram for ChallengeSymbols:
Public Member Functions | |
| ChallengeSymbols (const BehaviorControlInterfaces &interfaces) | |
| void | registerSymbols (Xabsl2Engine &engine) |
| registers the symbols at an engine | |
| void | update () |
| updates the symbols | |
| void | challenge2Swap (Pose2D *p, int i, int j) |
| void | challenge2ShortestPermutation (Pose2D *p, int n, double &minLength) |
| void | challenge2ShortestPath () |
| void | challenge2OptimalRotation (Pose2D &pose) |
| double | challenge2TargetPositionX () |
| Returns x coordinate of target position with current index. | |
| double | challenge2TargetPositionY () |
| Returns y coordinate of target position with current index. | |
| double | challenge2TargetPositionRotation () |
| Returns rotation of target position with current index. | |
Private Attributes | |
| Pose2D | targetPositions [5] |
| The 5 target positions for the localization challenge. | |
| double | index |
| the index for targetPosition? functions | |
| double | lastIndex |
| The index of the previous call. | |
Definition at line 20 of file ChallengeSymbols.h.
|
|
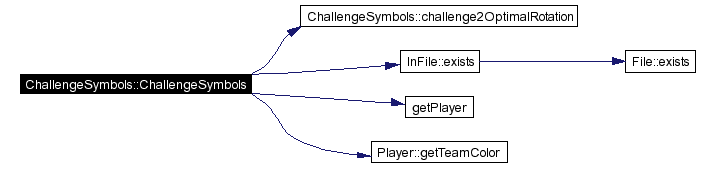
Definition at line 12 of file ChallengeSymbols.cpp. References challenge2OptimalRotation(), InFile::exists(), getPlayer(), Player::getTeamColor(), lastIndex, targetPositions, Pose2D::translation, and Vector2< double >::x. |
Here is the call graph for this function:
|
|
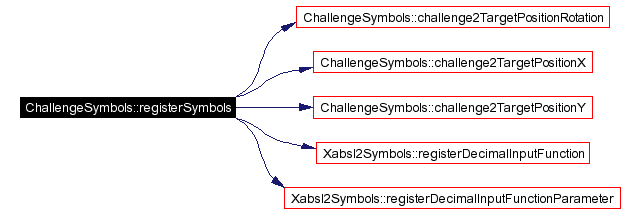
registers the symbols at an engine
Definition at line 35 of file ChallengeSymbols.cpp. References challenge2TargetPositionRotation(), challenge2TargetPositionX(), challenge2TargetPositionY(), Xabsl2Symbols::registerDecimalInputFunction(), and Xabsl2Symbols::registerDecimalInputFunctionParameter(). Referenced by GT2004BehaviorControl::registerSymbolsAndBasicBehaviors(). |
Here is the call graph for this function:
|
|
updates the symbols
Definition at line 56 of file ChallengeSymbols.cpp. |
|
||||||||||||||||
|
Definition at line 134 of file ChallengeSymbols.cpp. Referenced by challenge2ShortestPermutation(). |
|
||||||||||||||||
|
Definition at line 112 of file ChallengeSymbols.cpp. References challenge2Swap(), targetPositions, and Pose2D::translation. Referenced by challenge2ShortestPath(). |
Here is the call graph for this function:

|
|
Definition at line 98 of file ChallengeSymbols.cpp. References challenge2ShortestPermutation(), lastIndex, and targetPositions. Referenced by challenge2TargetPositionRotation(), challenge2TargetPositionX(), and challenge2TargetPositionY(). |
Here is the call graph for this function:

|
|
Definition at line 79 of file ChallengeSymbols.cpp. References pi, pi_2, Pose2D::rotation, Pose2D::translation, Vector2< double >::x, and Vector2< double >::y. Referenced by ChallengeSymbols(). |
|
|
Returns x coordinate of target position with current index.
Definition at line 61 of file ChallengeSymbols.cpp. References challenge2ShortestPath(), targetPositions, Pose2D::translation, and Vector2< double >::x. Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
Returns y coordinate of target position with current index.
Definition at line 67 of file ChallengeSymbols.cpp. References challenge2ShortestPath(), targetPositions, Pose2D::translation, and Vector2< double >::y. Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
Returns rotation of target position with current index.
Definition at line 73 of file ChallengeSymbols.cpp. References challenge2ShortestPath(), targetPositions, and toDegrees(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
The 5 target positions for the localization challenge.
Definition at line 42 of file ChallengeSymbols.h. Referenced by challenge2ShortestPath(), challenge2ShortestPermutation(), challenge2TargetPositionRotation(), challenge2TargetPositionX(), challenge2TargetPositionY(), and ChallengeSymbols(). |
|
|
the index for targetPosition? functions
Definition at line 43 of file ChallengeSymbols.h. |
|
|
The index of the previous call.
Definition at line 43 of file ChallengeSymbols.h. Referenced by challenge2ShortestPath(), and ChallengeSymbols(). |
 1.3.6
1.3.6