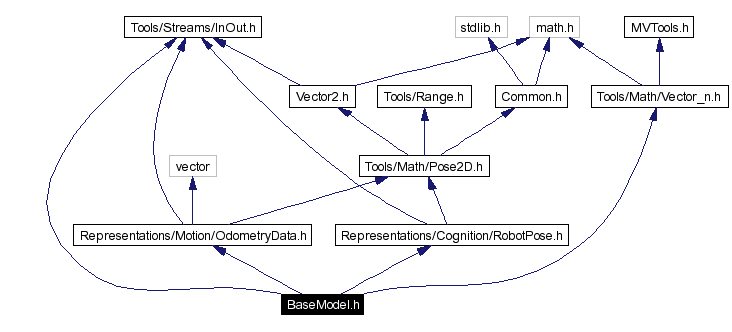
#include "Representations/Motion/OdometryData.h"
#include "Tools/Streams/InOut.h"
#include "Tools/Math/Vector_n.h"
#include "Representations/Cognition/RobotPose.h"
Include dependency graph for BaseModel.h:
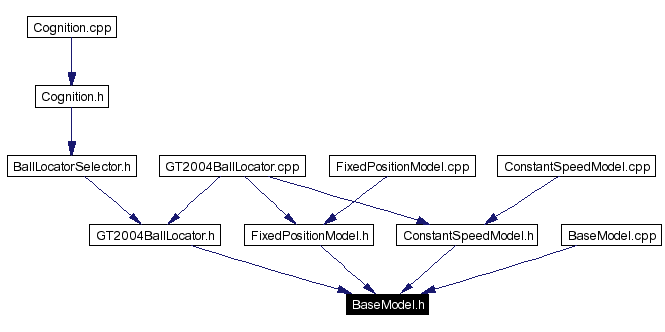
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | KalmanBallState |
| Contains the supposed ball state. More... | |
| class | KalmanUpdateResult |
| Contains the results of an update call of a KalmanBallLocator process model. More... | |
| class | KalmanPredictResult |
| Contains the results of a predict call of a KalmanBallLocator process model. More... | |
| class | KalmanProcessModelBase |
| Virtual base class defining the functions necessary to implement a KalmanBallLocator process model. More... | |
Definition in file BaseModel.h.
 1.3.6
1.3.6