#include <ObstaclesSymbols.h>
Inheritance diagram for ObstaclesSymbols:
Public Member Functions | |
| ObstaclesSymbols (const BehaviorControlInterfaces &interfaces) | |
| void | registerSymbols (Xabsl2Engine &engine) |
| registers the symbols at an engine | |
| void | update () |
| updates the symbols | |
Input symbols | |
| bool | getCollisionFrontLeft () |
| bool | getCollisionFrontRight () |
| bool | getCollisionHindLeft () |
| bool | getCollisionHindRight () |
| bool | getCollisionHead () |
| bool | getCollisionAggregate () |
| double | getConsecutiveCollisionTimeFrontLeft () |
| double | getConsecutiveCollisionTimeFrontRight () |
| double | getConsecutiveCollisionTimeHindLeft () |
| double | getConsecutiveCollisionTimeHindRight () |
| double | getConsecutiveCollisionTimeHead () |
| double | getConsecutiveCollisionTimeAggregate () |
| int | getCollisionSide () |
Public Attributes | |
| bool | robotIsStuck |
| Indicates if the robot is stuck (based on obstacles model). | |
| bool | obstaclesAreClose |
| Indicates that there are close obstacles. | |
| bool | opponentsCloseToBall |
| Indicates that there are opponents in the direction of the ball. | |
Definition at line 21 of file ObstaclesSymbols.h.
|
|
Definition at line 11 of file ObstaclesSymbols.cpp. |
|
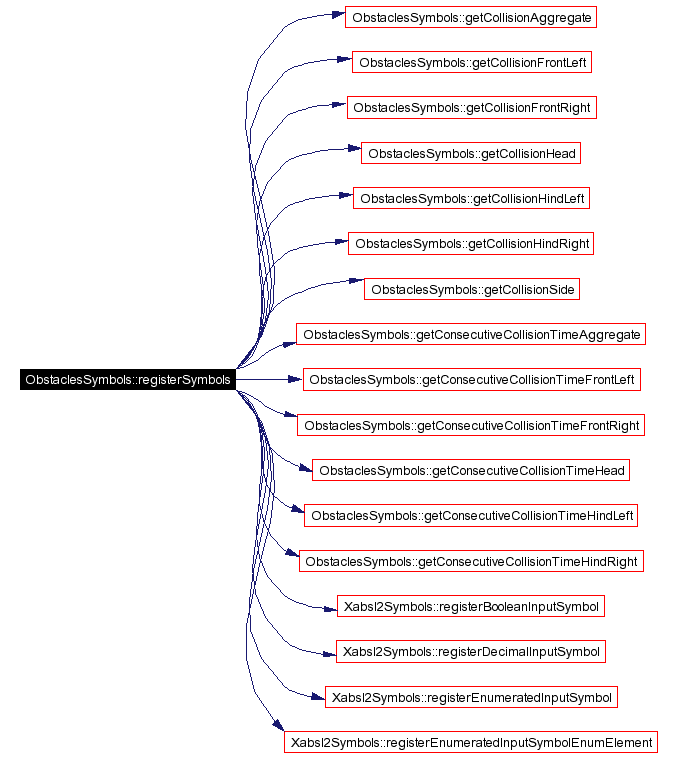
Here is the call graph for this function:
|
|
updates the symbols
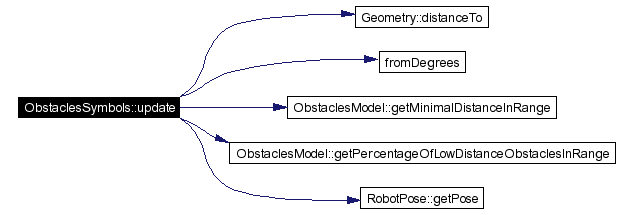
Definition at line 74 of file ObstaclesSymbols.cpp. References Geometry::distanceTo(), fromDegrees(), ObstaclesModel::getMinimalDistanceInRange(), ObstaclesModel::getPercentageOfLowDistanceObstaclesInRange(), RobotPose::getPose(), obstaclesAreClose, opponentsCloseToBall, pi_2, robotIsStuck, and BallModel::seen. Referenced by GT2004BehaviorControl::execute(). |
Here is the call graph for this function:
|
|
A function for the symbol "self.collision-front-left" Definition at line 97 of file ObstaclesSymbols.cpp. References RobotState::getCollisionFrontLeft(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.collision-front-right" Definition at line 102 of file ObstaclesSymbols.cpp. References RobotState::getCollisionFrontRight(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.collision-hind-left" Definition at line 107 of file ObstaclesSymbols.cpp. References RobotState::getCollisionHindLeft(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.collision-hind-right" Definition at line 112 of file ObstaclesSymbols.cpp. References RobotState::getCollisionHindRight(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.collision-head" Definition at line 117 of file ObstaclesSymbols.cpp. References RobotState::getCollisionHead(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.collision-aggregate" Definition at line 122 of file ObstaclesSymbols.cpp. References RobotState::getCollisionAggregate(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.consecutive-collision-time-front-left" Definition at line 127 of file ObstaclesSymbols.cpp. References RobotState::getConsecutiveCollisionTimeFrontLeft(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.consecutive-collision-time-front-right" Definition at line 132 of file ObstaclesSymbols.cpp. References RobotState::getConsecutiveCollisionTimeFrontRight(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.consecutive-collision-time-hind-left" Definition at line 137 of file ObstaclesSymbols.cpp. References RobotState::getConsecutiveCollisionTimeHindLeft(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.consecutive-collision-time-hind-right" Definition at line 142 of file ObstaclesSymbols.cpp. References RobotState::getConsecutiveCollisionTimeHindRight(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.consecutive-collision-time-head" Definition at line 147 of file ObstaclesSymbols.cpp. References RobotState::getConsecutiveCollisionTimeHead(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.consecutive-collision-time-aggregate" Definition at line 152 of file ObstaclesSymbols.cpp. References RobotState::getConsecutiveCollisionTimeAggregate(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
A function for the symbol "self.collision-side" Definition at line 157 of file ObstaclesSymbols.cpp. References RobotState::getCollisionSide(). Referenced by registerSymbols(). |
Here is the call graph for this function:

|
|
Indicates if the robot is stuck (based on obstacles model).
Definition at line 54 of file ObstaclesSymbols.h. Referenced by GT2004BehaviorControl::postExecute(), registerSymbols(), and update(). |
|
|
Indicates that there are close obstacles.
Definition at line 57 of file ObstaclesSymbols.h. Referenced by GT2004BehaviorControl::postExecute(), registerSymbols(), and update(). |
|
|
Indicates that there are opponents in the direction of the ball.
Definition at line 60 of file ObstaclesSymbols.h. Referenced by registerSymbols(), and update(). |
 1.3.6
1.3.6