#include <GaussBell.h>
Collaboration diagram for GaussBell:
Public Member Functions | |
| GaussBell () | |
| Constructor. | |
| ~GaussBell () | |
| Matrix2x2< double > | getCovarianceMatrix () |
| Returns the covariance matrix of the Gaussbell. | |
| Vector2< double > | getPositionOfMaximum () |
| Returns the position of the GaussBell-Maximum. | |
| double | getValidity (Vector2< double > _position) |
| Returns the validity-value at the position given in the argument. | |
| double | getValidityAtPositionOfMaximum () |
| Returns the validity. | |
| unsigned int | getTimeStamp () |
| Returns the time stamp. | |
| void | getSigmas (double &sigmaMaj, double &sigmaMin) |
| Returns the sigmas. | |
| double | getAngle () |
| Returns the angle. | |
| void | setCovarianceMatrix (double _validity, double _angle) |
| Sets the covarianceMatrix by the percepts of a player. | |
| void | setCovarianceMatrix (double _validity, double _deltaX, double _deltaY) |
| like the previous method aber faster! | |
| void | setCovarianceMatrix (Matrix2x2< double > _covarianceMatrix) |
| Sets the covarianceMatrix by another Matrix. | |
| void | setCovarianceMatrix (double _sigmaMaj, double _sigmaMin, double _deltaX, double _deltaY) |
| Sets the covariance-matrix (sigmas and validity will be correctly set, too). | |
| void | setPositionOfMaximum (Vector2< double > _positionOfMaximum) |
| Sets the position of one object one robot has percepted. | |
| void | setRotationAngle (double _rotationAngle) |
| Sets the rotation-angle and updates the covariance-matrix. | |
| void | setValidity (double _validity) |
| validity = _validity Error-correction included | |
| void | setSigmas (double _sigmaMaj, double _sigmaMin) |
| Sets the sigma-values and updates the covariance-matrix and the validity. | |
| void | setTimeStamp (unsigned long _timeStampGaussBell) |
| timeStamp = _timeStampGaussBell | |
| void | setTimeStamp () |
| set the time stamp to the actual system time | |
| void | updateValidity (double _validity) |
| if a older percept should be merged the validity has to be decreased | |
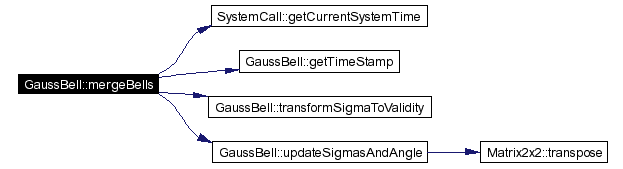
| void | mergeBells (GaussBell _gaussBell1, GaussBell _gaussBell2) |
| merges the bells _gaussBell1 and _gaussBell2 | |
Private Member Functions | |
| void | transformSigmaToValidity () |
| Calculates the validity from the sigma-values. | |
| void | transformValidityToSigma () |
| calculates sigmaMaj and sigmaMin when only the validity is given | |
| void | updateSigmasAndAngle () |
| calculates sigmaMaj, sigamMin and rotationAngle form the covariance matrix | |
| void | updateCovarianceMatrix () |
| calculates the CovarianceMatrix from sigmaMaj, sigmaMin and the rotationAngle | |
Private Attributes | |
| Matrix2x2< double > | covarianceMatrix |
| Vector2< double > | position |
| double | sigmaMaj |
| variance in maj | |
| double | sigmaMin |
| variance in min | |
| double | rotationAngle |
| double | validity |
| the validity of the percept | |
| unsigned long | timeStampGaussBell |
| The time when this GaussBell was active. | |
Static Private Attributes | |
| const int | phi [330] |
| phi-table of the normalized gauss distribution (index: factor 100, array: factor 10000) | |
| const int | invProb [1000] |
| inverted probability table of the normalized gauss distribution (index: factor 1000, array: factor 100) | |
| const double | radiusMaj = 300 |
| radius in maj-direction of the validity-ellipse | |
| const double | radiusMin = 150 |
| radius in min-direction of the validity-ellipse | |
| const double | factor = 1.0/1.78 |
The percepts from differnt robots will be interpreted as values which defines special Gauss-Bells.
Definition at line 23 of file GaussBell.h.
|
|
Constructor.
standard initialization Definition at line 188 of file GaussBell.cpp. References rotationAngle, setTimeStamp(), sigmaMaj, sigmaMin, validity, Vector2< double >::x, and Vector2< double >::y. |
Here is the call graph for this function:

|
|
Definition at line 202 of file GaussBell.cpp. |
|
|
Returns the covariance matrix of the Gaussbell.
Definition at line 210 of file GaussBell.cpp. References covarianceMatrix. |
|
|
Returns the position of the GaussBell-Maximum.
Definition at line 219 of file GaussBell.cpp. |
|
|
Returns the validity-value at the position given in the argument.
Definition at line 228 of file GaussBell.cpp. References validity. |
|
|
Returns the validity.
Definition at line 237 of file GaussBell.cpp. References validity. |
|
|
Returns the time stamp.
Definition at line 249 of file GaussBell.cpp. References timeStampGaussBell. Referenced by mergeBells(). |
|
||||||||||||
|
Returns the sigmas.
Definition at line 480 of file GaussBell.cpp. |
|
|
Returns the angle. (angle between x-axis and major-axis of bell). Definition at line 474 of file GaussBell.cpp. References rotationAngle. |
|
||||||||||||
|
Sets the covarianceMatrix by the percepts of a player.
Definition at line 304 of file GaussBell.cpp. References rotationAngle, transformValidityToSigma(), updateCovarianceMatrix(), and validity. |
Here is the call graph for this function:

|
||||||||||||||||
|
like the previous method aber faster!
Definition at line 316 of file GaussBell.cpp. References rotationAngle, sqr, transformValidityToSigma(), updateCovarianceMatrix(), and validity. |
Here is the call graph for this function:

|
|
Sets the covarianceMatrix by another Matrix.
Definition at line 293 of file GaussBell.cpp. References covarianceMatrix, transformSigmaToValidity(), and updateSigmasAndAngle(). |
Here is the call graph for this function:

|
||||||||||||||||||||
|
Sets the covariance-matrix (sigmas and validity will be correctly set, too).
Definition at line 339 of file GaussBell.cpp. References rotationAngle, sigmaMaj, sigmaMin, sqr, transformSigmaToValidity(), and updateCovarianceMatrix(). |
Here is the call graph for this function:

|
|
Sets the position of one object one robot has percepted.
Definition at line 361 of file GaussBell.cpp. |
|
|
Sets the rotation-angle and updates the covariance-matrix.
Definition at line 370 of file GaussBell.cpp. References rotationAngle, and updateCovarianceMatrix(). |
Here is the call graph for this function:

|
|
validity = _validity Error-correction included
Definition at line 281 of file GaussBell.cpp. References transformValidityToSigma(), updateCovarianceMatrix(), and validity. |
Here is the call graph for this function:

|
||||||||||||
|
Sets the sigma-values and updates the covariance-matrix and the validity.
Definition at line 398 of file GaussBell.cpp. References sigmaMaj, sigmaMin, transformSigmaToValidity(), and updateCovarianceMatrix(). |
Here is the call graph for this function:

|
|
timeStamp = _timeStampGaussBell
Definition at line 380 of file GaussBell.cpp. References timeStampGaussBell. |
|
|
set the time stamp to the actual system time
Definition at line 389 of file GaussBell.cpp. References SystemCall::getCurrentSystemTime(), and timeStampGaussBell. Referenced by GaussBell(). |
Here is the call graph for this function:

|
|
if a older percept should be merged the validity has to be decreased This will be used in SensorFusionBallLocator. Definition at line 411 of file GaussBell.cpp. References transformValidityToSigma(), updateCovarianceMatrix(), and validity. |
Here is the call graph for this function:

|
||||||||||||
|
merges the bells _gaussBell1 and _gaussBell2 Result is a gauss-bell, Definition at line 258 of file GaussBell.cpp. References covarianceMatrix, SystemCall::getCurrentSystemTime(), getTimeStamp(), position, timeStampGaussBell, transformSigmaToValidity(), and updateSigmasAndAngle(). |
Here is the call graph for this function:
|
|
Calculates the validity from the sigma-values.
Definition at line 440 of file GaussBell.cpp. References phi, radiusMaj, radiusMin, sigmaMaj, sigmaMin, and validity. Referenced by mergeBells(), setCovarianceMatrix(), and setSigmas(). |
|
|
calculates sigmaMaj and sigmaMin when only the validity is given
Definition at line 425 of file GaussBell.cpp. References factor, invProb, radiusMaj, radiusMin, sigmaMaj, sigmaMin, and validity. Referenced by setCovarianceMatrix(), setValidity(), and updateValidity(). |
|
|
calculates sigmaMaj, sigamMin and rotationAngle form the covariance matrix
Definition at line 512 of file GaussBell.cpp. References Matrix2x2< V >::c, Matrix2x2< double >::c, covarianceMatrix, pi_4, rotationAngle, sigmaMaj, sigmaMin, Matrix2x2< V >::transpose(), Vector2< double >::x, and Vector2< double >::y. Referenced by mergeBells(), and setCovarianceMatrix(). |
Here is the call graph for this function:

|
|
calculates the CovarianceMatrix from sigmaMaj, sigmaMin and the rotationAngle
Definition at line 489 of file GaussBell.cpp. References Matrix2x2< double >::c, Matrix2x2< V >::c, covarianceMatrix, rotationAngle, sigmaMaj, sigmaMin, Matrix2x2< V >::transpose(), Vector2< double >::x, and Vector2< double >::y. Referenced by setCovarianceMatrix(), setRotationAngle(), setSigmas(), setValidity(), and updateValidity(). |
Here is the call graph for this function:

|
|
Definition at line 70 of file GaussBell.h. Referenced by getCovarianceMatrix(), mergeBells(), setCovarianceMatrix(), updateCovarianceMatrix(), and updateSigmasAndAngle(). |
|
|
Definition at line 71 of file GaussBell.h. Referenced by mergeBells(). |
|
|
variance in maj direction Definition at line 73 of file GaussBell.h. Referenced by GaussBell(), getSigmas(), setCovarianceMatrix(), setSigmas(), transformSigmaToValidity(), transformValidityToSigma(), updateCovarianceMatrix(), and updateSigmasAndAngle(). |
|
|
variance in min direction direction Definition at line 73 of file GaussBell.h. Referenced by GaussBell(), getSigmas(), setCovarianceMatrix(), setSigmas(), transformSigmaToValidity(), transformValidityToSigma(), updateCovarianceMatrix(), and updateSigmasAndAngle(). |
|
|
Definition at line 75 of file GaussBell.h. Referenced by GaussBell(), getAngle(), setCovarianceMatrix(), setRotationAngle(), updateCovarianceMatrix(), and updateSigmasAndAngle(). |
|
|
the validity of the percept
Definition at line 76 of file GaussBell.h. Referenced by GaussBell(), getValidity(), getValidityAtPositionOfMaximum(), setCovarianceMatrix(), setValidity(), transformSigmaToValidity(), transformValidityToSigma(), and updateValidity(). |
|
|
phi-table of the normalized gauss distribution (index: factor 100, array: factor 10000)
Definition at line 18 of file GaussBell.cpp. Referenced by transformSigmaToValidity(). |
|
|
inverted probability table of the normalized gauss distribution (index: factor 1000, array: factor 100)
Definition at line 59 of file GaussBell.cpp. Referenced by transformValidityToSigma(). |
|
|
radius in maj-direction of the validity-ellipse the validity is the probability that the real position lies within this ellipe Definition at line 183 of file GaussBell.cpp. Referenced by transformSigmaToValidity(), and transformValidityToSigma(). |
|
|
radius in min-direction of the validity-ellipse
Definition at line 184 of file GaussBell.cpp. Referenced by transformSigmaToValidity(), and transformValidityToSigma(). |
|
|
Definition at line 16 of file GaussBell.cpp. Referenced by transformValidityToSigma(). |
|
|
The time when this GaussBell was active. This attribut will be needed for merging history-Data into the fusion. Definition at line 89 of file GaussBell.h. Referenced by getTimeStamp(), mergeBells(), and setTimeStamp(). |
 1.3.6
1.3.6