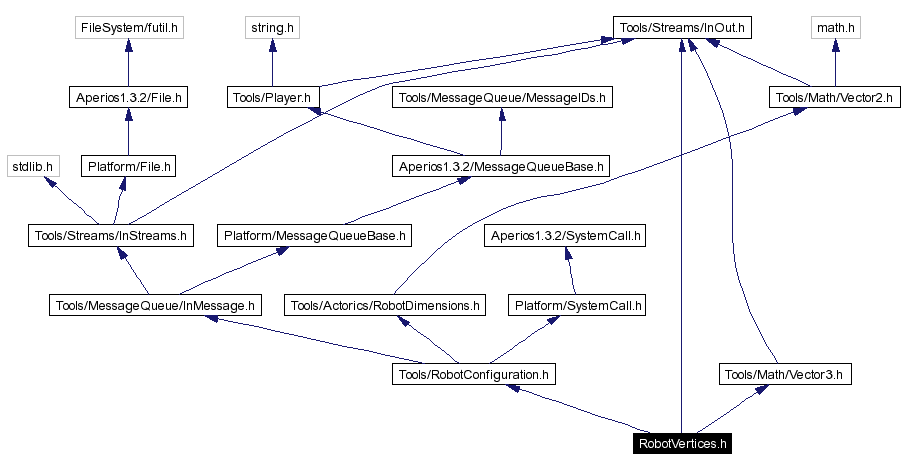
#include "Tools/Streams/InOut.h"
#include "Tools/Math/Vector3.h"
#include "Tools/RobotConfiguration.h"
Include dependency graph for RobotVertices.h:
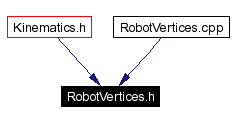
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | RobotVertices |
| The RobotVertices struct contains the 3D position of important points of the robot like the shoulder, knee and foot positions. More... | |
Functions | |
| In & | operator>> (In &stream, RobotVertices &robotVertices) |
| Streaming operator that reads a RobotVertices from a stream. | |
| Out & | operator<< (Out &stream, const RobotVertices &robotVertices) |
| Streaming operator that writes a RobotVertices to a stream. | |
Definition in file RobotVertices.h.
|
||||||||||||
|
Streaming operator that reads a RobotVertices from a stream.
Definition at line 33 of file RobotVertices.cpp. References In::read(). |
Here is the call graph for this function:

|
||||||||||||
|
Streaming operator that writes a RobotVertices to a stream.
Definition at line 39 of file RobotVertices.cpp. References Out::write(). |
Here is the call graph for this function:

 1.3.6
1.3.6