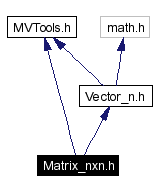
#include "MVTools.h"
#include "Vector_n.h"
Include dependency graph for Matrix_nxn.h:
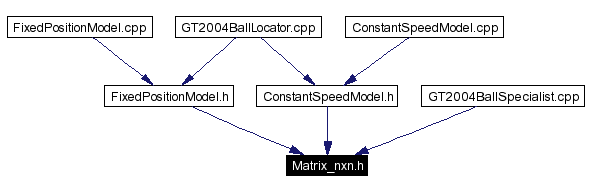
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Matrix_nxn |
| Represents a nxn matrix of type T. More... | |
Defines | |
| #define | MATRIX_NXN_HEAP |
Functions | |
| template<class T, size_t N> Matrix_nxn< T, N > | operator * (const Matrix_nxn< T, N > &m1, const Matrix_nxn< T, N > &m2) |
| Operator * for matrix-matrix multiplication. | |
| template<class T, size_t N> Matrix_nxn< T, N > | invert (const Matrix_nxn< T, N > &m) |
| Inverts the passed matrix. | |
| template<class T, size_t N> Matrix_nxn< T, N > | operator+ (const Matrix_nxn< T, N > &m1, const Matrix_nxn< T, N > &m2) |
| Operator + for matrix additions. | |
| template<class T, size_t N> Matrix_nxn< T, N > | operator- (const Matrix_nxn< T, N > &m1, const Matrix_nxn< T, N > &m2) |
| Operator - for matrix subtractions. | |
| template<class T, size_t N> Vector_n< T, N > | operator * (const Matrix_nxn< T, N > &m, const Vector_n< T, N > &v) |
| Operator * for matrix-vector multiplication. | |
| template<class T, size_t N> Matrix_nxn< T, N > | transpose (const Matrix_nxn< T, N > &m) |
| Transposes a matrix. | |
| template<class T, size_t N> Matrix_nxn< T, N > | eye_nxn () |
| Creates an identity matrix. | |
| template<class T, size_t N> Matrix_nxn< T, N > | invert2 (const Matrix_nxn< T, N > &m) |
| Inverts the passed matrix. | |
| template<class T, size_t N> Matrix_nxn< T, N > | operator/ (const Matrix_nxn< T, N > &m1, const Matrix_nxn< T, N > &m2) |
| Divides first matrix by second matrix (multiplicates with inverse of second matrix). | |
| template<class T, size_t N> T | det (const Matrix_nxn< T, N > &m) |
| Returns determinant of the passed matrix. | |
Definition in file Matrix_nxn.h.
|
|
Definition at line 11 of file Matrix_nxn.h. |
|
||||||||||||||||
|
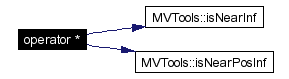
Operator * for matrix-matrix multiplication.
Definition at line 579 of file Matrix_nxn.h. References MVTools::isNearInf(), and MVTools::isNearPosInf(). |
Here is the call graph for this function:
|
||||||||||
|
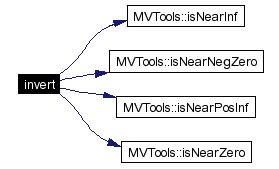
Inverts the passed matrix. Matrix must not be singular
Definition at line 674 of file Matrix_nxn.h. References MVTools::isNearInf(), MVTools::isNearNegZero(), MVTools::isNearPosInf(), and MVTools::isNearZero(). Referenced by operator/(), KalmanFixedPositionModel::update(), and KalmanConstantSpeedModel::update(). |
Here is the call graph for this function:
|
||||||||||||||||
|
Operator + for matrix additions.
Definition at line 545 of file Matrix_nxn.h. |
|
||||||||||||||||
|
Operator - for matrix subtractions.
Definition at line 562 of file Matrix_nxn.h. |
|
||||||||||||||||
|
Operator * for matrix-vector multiplication.
Definition at line 613 of file Matrix_nxn.h. References MVTools::isNearInf(), and MVTools::isNearPosInf(). |
Here is the call graph for this function:
|
||||||||||
|
Transposes a matrix.
Definition at line 642 of file Matrix_nxn.h. Referenced by invert2(), KalmanFixedPositionModel::update(), and KalmanConstantSpeedModel::update(). |
|
|||||||||
|
Creates an identity matrix.
Definition at line 658 of file Matrix_nxn.h. |
|
||||||||||
|
Inverts the passed matrix. Matrix must not be singular
Definition at line 795 of file Matrix_nxn.h. References e, Matrix_nxn< T, N >::solve(), and transpose(). |
Here is the call graph for this function:
|
||||||||||||||||
|
Divides first matrix by second matrix (multiplicates with inverse of second matrix).
Definition at line 817 of file Matrix_nxn.h. References invert(). |
Here is the call graph for this function:
|
||||||||||
|
Returns determinant of the passed matrix.
Definition at line 831 of file Matrix_nxn.h. References Matrix_nxn< T, N >::det(). Referenced by KalmanFixedPositionModel::update(), and KalmanConstantSpeedModel::update(). |
Here is the call graph for this function:

 1.3.6
1.3.6