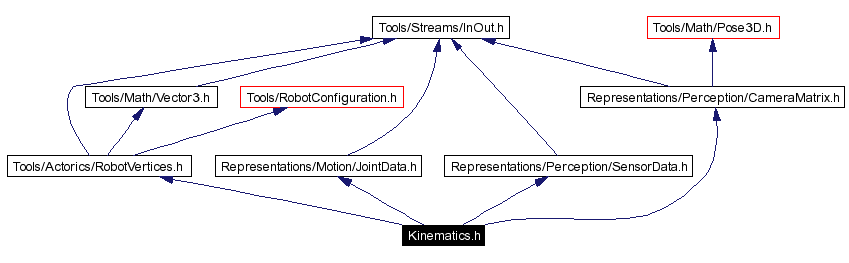
#include "Tools/Actorics/RobotVertices.h"
#include "Representations/Motion/JointData.h"
#include "Representations/Perception/SensorData.h"
#include "Representations/Perception/CameraMatrix.h"
Include dependency graph for Kinematics.h:
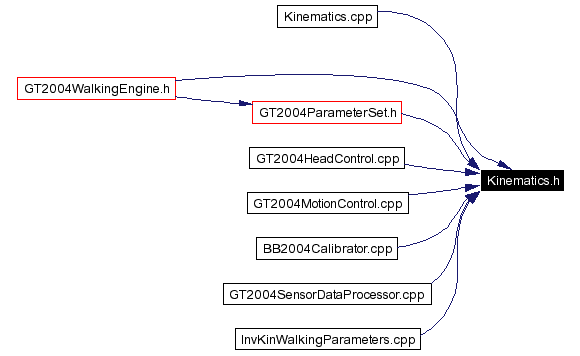
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Kinematics |
| Provides Methods for robots kinematic calculations. More... | |
Defines | |
| #define | LEFTLEG(leg) ((leg==Kinematics::fl)||(leg==Kinematics::hl)) |
| #define | FORELEG(leg) ((leg==Kinematics::fr)||(leg==Kinematics::fl)||(leg==Kinematics::basefront)) |
| #define | LEGBASE(leg) ((leg==Kinematics::basefront)||(leg==Kinematics::basehind)) |
Uwe Düffert
Definition in file Kinematics.h.
|
|
Definition at line 18 of file Kinematics.h. Referenced by InvKinWalkingEngine::calculateFootPositions(), GT2004WalkingEngine::calculateFootPositions(), Kinematics::kneePositionFromJoints(), Kinematics::legPositionFromJoints(), and Kinematics::transformToLegBase(). |
|
|
|
Definition at line 20 of file Kinematics.h. Referenced by Kinematics::kneePositionFromJoints(), Kinematics::legPositionFromJoints(), and Kinematics::transformToLegBase(). |
 1.3.6
1.3.6